
In my last couple of posts I compared a u-blox M8T single frequency receiver to a Tersus BX306 dual frequency receiver for a static rover using a fairly distant CORS receiver for base data. Both receivers had over twenty raw phase measurements, but the Tersus receiver had much better overlap with the CORS receiver with twelve measurements available for ambiguity resolution (GPS L1 and L2) while the M8T had only six (GPS L1). Not surprisingly, the Tersus provided a much better solution than the M8T. I also compared the RTKLIB solution and the internal Tersus RTK solution and showed that they appeared to be roughly comparable.
In this post, I will add a second M8T receiver and compare a M8T to M8T short baseline solution to the Tersus to CORS longer baseline solution. While this may not sound like a fair comparison, it could be a reasonable choice given that two M8T receivers are still significantly less expensive than one Tersus receiver. Also, to make things more interesting, I will use a moving rover this time rather than a stationary one.
For the experiment, I mounted both receivers in a car, each with it’s own antenna on the roof. Given that we are making a comparison to a relatively expensive solution I felt it wouldn’t be unreasonable to add $20 to the M8T solution and upgraded its antenna from the standard $20 u-blox antenna I usually use to a Tallysman 1421 antenna available at Digikey for $42. For the Tersus receiver I used a Tallysman dual frequency 3872 antenna which I believe is roughly a $200 antenna. For the M8T base station, I used the same antenna on my house roof as in the previous experiment which gave a baseline less than 1 km for most of the M8T pair solution whereas the Tersus/CORS baseline was roughly 16-18 km. For RTKLIB post-processing, I also ran a solution using base data from the nearest CORS station which gave a baseline of 7-9 km but I couldn’t use this data for the Tersus internal RTK solution because it is not available real-time. Also, it should be noted that I collected all this data a few weeks ago before Tersus released their most recent firmware so it was all done using their previous version.
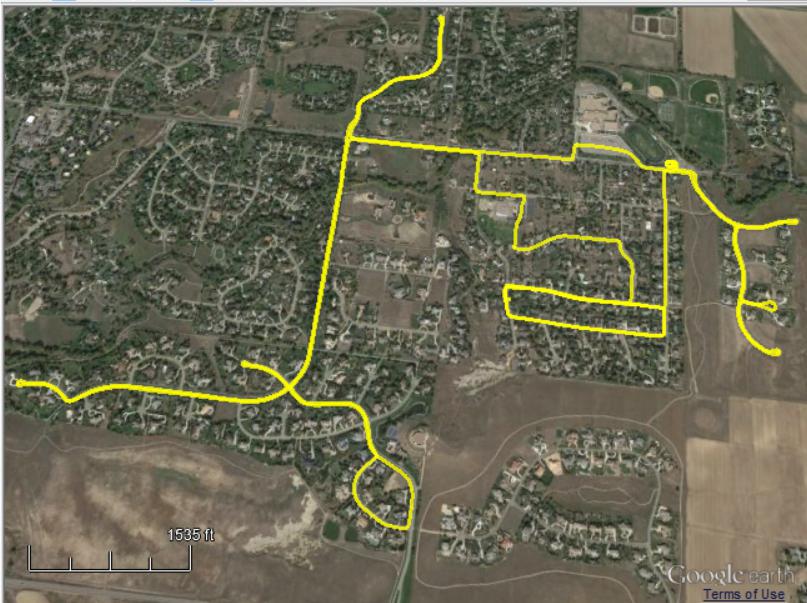
I chose a driving route very similar to the one I used for this M8N to M8T comparison in which I drive through a residential neighborhood with a moderate tree canopy. This time I added a section of the route in a parking lot with no tree obstructions. The parking lot is intended to be a low-stress environment and the neighborhood streets a moderate-stress environment. Here’s a Google Earth image of the previous route to give a feel for the terrain. Unfortunately this map feature no longer works in RTKLIB because Google has discontinued the API to Google Earth.
In this case the M8T was receiving signals from the GPS, GLONASS, SBAS, and Galileo satellites and started the data set with a total of 21 phase measurements. All of these can be used for ambiguity resolution since the two receivers are identical hardware. The Tersus receiver measured only GPS and GLONASS but for all but a couple of satellites got both an L1 and an L2 measurement. It started the data set with 24 phase measurements of which I would expect that only the 14 GPS phase measurements are available for ambiguity resolution because the receivers are not identical.
The previous time I ran this experiment I was able to get a nearly 100% fix solution from both the M8N and the M8T receiver pairs but had to use some solution tracking gain (fix-and-hold) to achieve that.
In this case, with the extra Galileo satellites and the more expensive antenna, I was able to get nearly 100% fix using continuous ambiguity resolution instead of fix-and-hold. Continuous AR has the advantage of reducing the chances of locking to a false fix and is normally a preferrable solution if it is achievable. The only float part of the solution was at the very end of the route where I parked the car underneath a large tree.
Here are three versions of the M8T receiver pair solution all run with continuous ambiguity resolution. In all the plots, green is a fixed solution and yellow is a float solution. The top left solution was run with 5 Hz measurements which is what I normally use for moving rovers. I then realized that the Tersus data was only 1 Hz, so I re-ran the M8T solution after decimating the raw data down to 1 Hz (the latest Tersus firmware supports 5 Hz RTK solution). The decimation can sometimes cause problems because the cycle slips aren’t always handled properly in the decimated data but in this case it seemed to work fine as can be seen in the plot on the top right. The only noticeable difference is that the 1 sec data took a little longer to get to first fix. This is less important in post-processed solutions because the solution can always be run in combined (forward/backward) mode which will usually get a fix for the beginning of the data. This can be seen here in the bottom left solution which was run in combined mode.
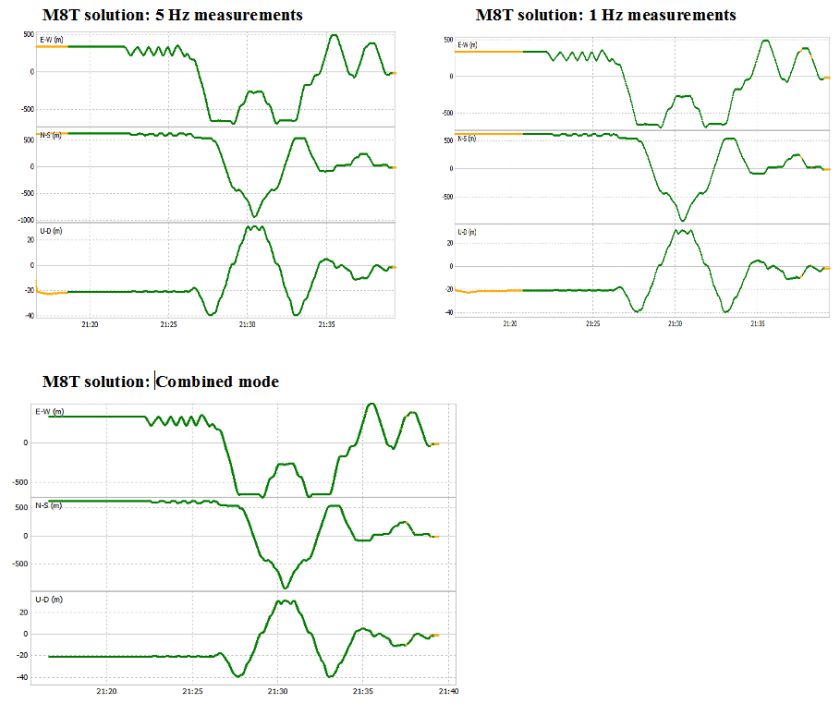
The zig-zag line from 21:22 to 21:26 is the lower stress circles in the parking lot followed by the moderate stress route through the residential neighborhood.
Next, let’s look at the Tersus solutions. The internal Tersus RTK solution was run with the Tersus default settings. The user interface for the Tersus console app is much simpler than RTKLIB so there are many fewer options to play with. For most users this is probably an advantage because it avoids the rather overwhelming array of options that RTKLIB gives. The RTKLIB solution was run with continuous ambiguity resolution with settings very similar to the M8T solution, just adjusted for dual frequency. The internal solution is on the left and the RTKLIB solution on the right.
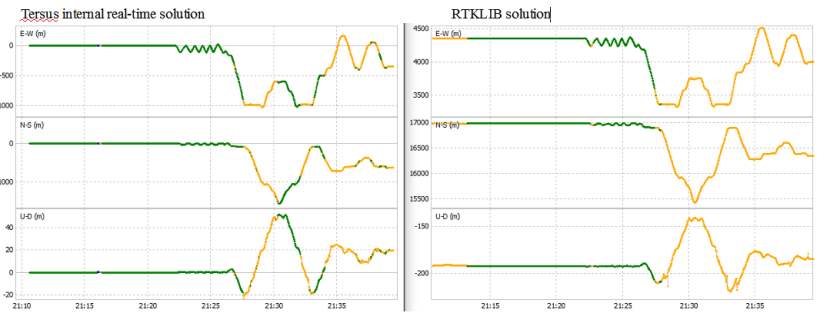
The two solutions are fairly similar, both did well in the lower stress parking lot environment but struggled with the moderate stress on the residential streets. The internal solution did a little better with scattered fixes in the latter part of the data.
Comparing differences between the internal and RTKLIB solutions and between the Tersus and M8T solutions for only the fixed points, it looks like most of the errors between the different solutions when they have a fix are small. The Tersus/M8T differences are indicated by the distance from the circle as I have described before. I’m not too worried about the DC offsets between them. It is somewhat tricky to get all the offsets correct and I did not spend a lot of time on that. It is likely to be a issue with coordinate differences or handling of antenna offsets that explains the DC shifts.

The above Tersus RTKLIB solutions were run with only GPS ambiguity resolution as I would not expect the GLONASS measurements to be useful for ambiguity resolution because of the inter-channel bias differences between the non-identical receivers. However I was surprised to find that I did get fixes with the GLONASS ambiguity resolution set to “On” in the RTKLIB configuration file. The solution was slightly worse than the GPS-only AR but I did verify that the GLONASS satellites were included in the ambiguity resolution. I’m not quite sure what to make of this observation, whether or not it makes sense to include the GLONASS measurements in the ambiguity resolution, but I suspect it makes sense to leave them out for the reason mentioned above.

I then ran another RTKLIB post-processed solution using the Tersus and base station data from a closer CORS base station. This was to see how reducing the baseline affected the answer. Here’s the result from a base station that is only 7-9 km away.

Even though we reduced the baseline by a factor of two the solution only got slightly better and time to first fix actually increased. This suggests that the long baseline may not be the primary reason for the poorer Tersus solution.
My suspicion is that it is a combination of two things, at least for the RTKLIB solutions. First of all I believe there is a mismatch between how RTKLIB interprets a cycle slip flag and how the cycle slip flag is defined in the Rinex spec. The problem is that RTKLIB resets the phase bias estimate in the same epoch as the cycle slip is logged regardless of whether the receiver has had time to relock or not. This can cause large errors in the bias estimates if the receiver flags a cycle slip before it has recovered from it. In some of my earlier posts I have described having the same problem with the M8T receiver but in that case I have made some changes in the u-blox specific RTKLIB code to delay the cycle slips until the receiver has re-locked. Something similar may need to be done for other RTKLIB receiver specific code including the Tersus or it may be possible to modify the main RTKLIB code to better interpret these cycle slip flags.
Maybe more important, though, is the difference in the measurements between the two receivers. As mentioned before, the M8T receiver has 21 phase measurements all of which can be used for ambiguity resolution while the Tersus has 24 of which only 14 can be used for ambiguity resolution assuming we don’ t try and use the GLONASS satellites. Note, though, that there are only seven different satellite-receiver paths for the Tersus since each satellite is providing two measurements. This compares to the 21 satellite-receiver paths for the M8T receiver where each satellite only provides a single measurement. Now imagine that the receivers are under a partial tree canopy and four of the satellites are obstructed for both receivers. The M8T will lose four measurements and still have 17 to work with but the Tersus receiver will lose 8 measurements and only have six to work with. This is a significant disadvantage and I suspect can explain a large part of the difference in results.
If I had used a local Tersus base station, then the matched Tersus receiver pair would enable use of the GLONASS satellites for ambiguity resolution. In the case of four obstructed satellites, the two cases would be much more similar with 17 available measurements for the M8T and 16 for the Tersus. As more satellites were obstructed the M8T would start to gain a bigger advantage since the Tersus would lose two measurements for each obstructed satellite and the M8T would only lose one. Of course the M8T would tend to have more obstructed satellites than the Tersus since it has more satellites to start with that can be obstructed. That would work in favor of the Tersus reciever. It’s hard to say which would give a better solution but my suspicion would be that if the cycle slip handling issue in RTKLIB was fixed the two solutions would be fairly similar when calculated with RTKLIB. I don’t know enough about the internal Tersus RTK engine to predict how it would do. Hopefully I can get my hands on a second full dual frequency receiver and run this experiment soon.
Although I ran this experiment at a random time without looking at the satellite alignment first, it may be that the satellite alignment was such that it accentuated this effect. Note in the observations (Tersus on the top, M8T on the bottom) that the Galileo (Exx) and SBAS (Ixx) satellites have less cycle slips than any of the other satellites.

Looking at the skyplot for those observations we see that three of the four Galileo satellites are at very high elevations which will tend to be blocked less from nearby trees. This would have helped the M8T solution since the Tersus receiver did not have access to these high elevation satellites.

I will try to summarize what I think this data suggests but let me first emphasize that this is by no means intended to be any sort of rigorous analysis. I don’t have the time, resources or knowledge to do that. Instead, please take these as no more than the sharing of my thought process as I try to understand some of the differences between single and dual frequency RTK solutions.
Rover to CORS or other traditional dual frequency receiver: Tersus has a significant advantage over the M8T both because of more matched measurements and opportunities to take advantage of the nature of the dual frequency measurements. This advantage applies both to the RTKLIB solution and the Tersus solution although I suspect the Tersus solution takes better advantage of the dual-frequency measurements. The advantage also increases as the baseline increases.
Matched pair of receivers with short baseline: Good results with the RTKLIB solution will be limited to low stress environments for a pair of Tersus receivers because of limitations in the cycle slip flag handling. With the M8N and M8T, RTKLIB can also handle moderate stress environments because of receiver specific changes in the RTKLIB cycle slip handling code. Relative to a Tersus/CORS combination, the M8T matched pair solution will in general be superior for short baselines because of more matched measurements.
Matched pair of receivers with long baseline: The data in this experiment doesn’t cover this case but as the baseline increases the dual frequency receiver pair should have a greater advantage because of the additional information that can be derived from the dual frequency measurements.
From a cost trade-off perspective, this suggests that the ideal way to combine these receivers might be to build the base with both an M8T single frequency receiver and a Tersus dual frequency receiver, both sharing a single antenna. The rover would then be a second M8T receiver. This would give the advantage of the dual frequency receiver for locating the absolute position of the base using long baseline solutions to distant reference stations or even PPP solutions while taking advantage of the matched pair of lower cost receivers for the moving rover piece of the solution.

Tersus release another firmware last month. Did you have a chance to evaluate the test?
LikeLike
Hi Yudan. Not yet but hope to do a four way moving rover comparison between the M8T, Swiftnav, Tersus, and Comnav soon.
LikeLike
Sound cool. If possible, it is better to do the test using one antenna with splitter, especially for kinematic case, then we can compare the differences amongst solutions. It can provide a consistent indicator when there is no ground truths.
LikeLike
I check the area you were driving through on Street view – the trees are quite far from the road in my opinion. Would you mind trying even more difficult environment? Just a quick check in your area – the Cedarwood Cir street looks much more challenging! Would love to see a test of it!
Here it is:
https://www.google.com/maps/@40.0663714,-105.1862854,160m/data=!3m1!1e3
Have you checked this post?
http://www.calvert.ch/maurice/2017/08/28/ublox-c94-m8p-rtk-gps-review-performance-evaluation/
That guy tired to scientifically evaluate obscured sky scenario (Sky360, Sky270, Sky180, Sky90 etc.) – unfortunately the setup was not very precise but he got a rough estimates at least. Again I would love to see similar tests of yours :).
LikeLike
Hi Jan. Yes, I would describe the environment I have been testing in as light to moderate sky view obstructions. I have found that this is the limit of what I can get a fixed solution for with the u-blox receivers. Even in this environment I do not always get 100% fix. I have started to explore moving rovers in more challenging environments in which RTKLIB often only gets a float solution but have found the results difficult to interpret since the RTKLIB accuracy estimates can be much too optimistic and I have no absolute reference. I hope to discuss this more in the near future.
LikeLike
You mentioned that Google Earth doesn’t work in RTKLIB anymore. However, you can save the GPX files in RTKLIB and import them into Google Earth.
LikeLike
Another great post. This is basically my fav blog right now — you’re doing the first real-world analysis (that I’m aware of) of the new generation of hobbyist-marketed RTK receivers. Would love if you could baseline results against a proven RTK solution like ComNav/Trimble/Novatel — but understand that the main focus of the blog is RTKLib.
LikeLike
Hi Roby. First of all, your “Spilling the Beans on RTK” post was both the most informative and enjoyable read I came across in my recent foray into low cost dual freq receivers … and I’m not just saying that because you liked my blog 🙂 You’ve also sparked some great discussion about low cost receivers on the forums. Keep it up!
After reading about your positive experience with the ComNav K501J, I’d be very interested in baselining it against an M8T. I just need to figure how to get my hands on one for a couple of weeks …
LikeLike