
Some of you may remember, one of the first code changes I made to RTKLIB was fixing a bug in the arlockcnt feature. Arlockcnt is an input parameter that specifies how many samples delay occurs before a new satellite (or a satellite that just recovered from a cycle-slip) is used for ambiguity resolution. Holding off use of the new phase-biase estimate from the kalman filter until it has had enough time to converge prevents corruption of the ambiguity resolution integer set. This in turn prevents a loss of fix.
Although waiting a fixed number of samples is fairly effective, it is not an optimal solution. Ideally we would use information from a new satellite as soon as it was converged and not after a fixed amount of time since some satellites will converge faster than others. When your data looks like this one, then every additional sample you can process is going to help.
This is what the AR filter attempts to do. In the current code implementation, a new satellite is unconditionally added to the integer ambiguity set when the arlockcnt expires regardless of the effect it has on the AR (ambiguity resolution) ratio. This means that the arlockcnt must be set conservatively, to insure the slowest satellite has converged, and means that most satellites will not be used for ambiguity resolution as early as they could be. In the case of frequent cycle-slips, this could mean loss of fix from having too few satellites available or it could mean a false fix since less satellites gives a less robust ambiguity resolution.
When the AR filter is enabled, a new satellite is still added to the integer ambiguity set when the arlockcnt expires but the effect of adding each new satellite is evaluated and if it causes a significant degradation in the AR ratio, that satellite’s use in ambiguity resolution will be delayed for a few more samples before being re-evaluated. Exactly how to define “significant degradation” is a bit subjective. I have chosen to disqualify a new satellite if it causes the AR ratio to drop below the AR fix threshold or if drops by more than a factor of two and the result is within 10% of the AR fix threshold. Exactly how long a satellite should be delayed is also subjective. I chose to delay a disqualified satellite for five samples plus a stagger of one sample for additional satellites. If two satellites are disqualified on the same sample, it could be either satellite or both that caused the disqualification. By adding a stagger to the delay for the second satellite, they will be re-evaluated independently on different samples.
To evaluate the change, I ran two solutions on the Ublox M8T data from my previous series of “M8N vs M8T” posts. This is my most challenging data set from a cycle-slip perspective. The solution below on the left is with arlockcnt=0 and AR filter disabled. The solution on the right is with arlockcnt=0 and AR filter enabled. As always, the yellow represents a float solution, and the green, a fixed solution. As you can see, enabling the AR filter significantly improved the number of fixes. Normally I would not set arlockcnt to zero if the AR filter was not enabled, this was for comparison purposes only.

As you would expect, with the AR filter disabled, increasing arlockcnt from 0 to 75 samples (15 sec) improves the solution for this data set as shown below but it still loses fix relatively often compared to the solution above with the AR filter enabled.

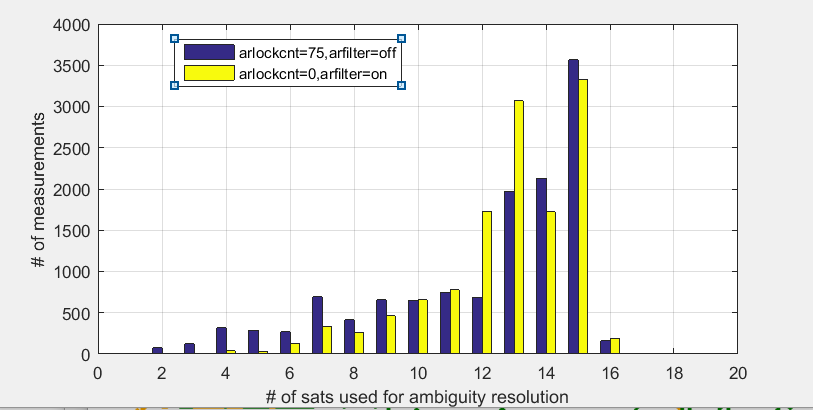
The plot below compares the number of satellites available for ambiguity resolution between the “arlockcnt=75/filter off“ solution and the “arlockcnt=0/filter on” solution”. Notice that we have significantly reduced the number of samples with less than 10 satellites available for AR by enabling the AR filter. More satellites should mean less chance of losing fix and also less chance of a false fix.
In this example, the accuracy of the fixed solution points did not seem to be noticeably affected by enabling the AR filter. As usual, I evaluate accuracy by comparing the receiver position relative to the position of a second receiver mounted on the same rover, both relative to the same base receiver. The difference between the two rovers should be a perfect circle, so any errors will appear as deviations from the circle. Plotting for only the fixed points, the “arlockcnt=75/filter off“ solution is on the left and the “arlockcnt=0/filter on” solution on the right. In both cases the errors appear to be very similar and within a few centimeters. This probably makes sense since the same satellites were used to calculate position in both cases, it was only the ambiguity resolution that differed. Any advantage from having more satellites in the AR calculations could be offset by the fact that the additional satellites were probably noisier since they may not have been fully converged. Also, the plot on the left does not include many of the points on the right, since samples without a fix are not included.

I actually created the AR filter feature quite a while ago but never got around to describing it or even fully testing it by reducing arlockcnt to zero. I have now done that, and made some small improvements to it in the last few days. I have updated my Github repository and executables folder with the latest version.
That pretty much completes my general explanation of this feature but there are a few details to be aware of if you are interested in trying it out yourself.
First of all, enabling the AR filter will slightly increase the code execution time since if a satellite is rejected, the ambiguity resolution has to be re-run without the rejected satellite. The difference is small enough however that I don’t think it will be an issue in the vast majority of cases.
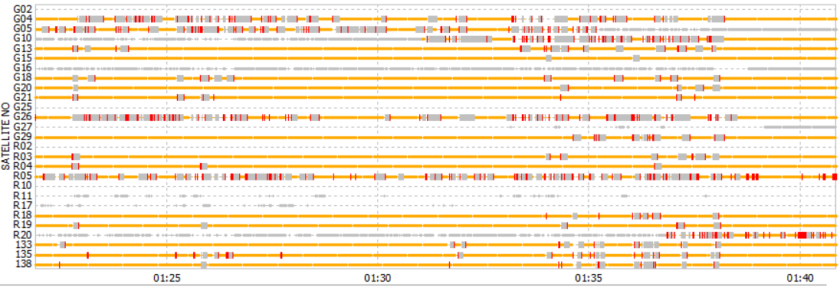
The second thing is to understand is how the arlockcnt interacts with the half-cycle valid bit. A typical cycle-slip (at least on a Ublox receiver) looks like the plot below. There is usually a gap of no data, then a cycle-slip (red tick), then a number of half-cycle invalid samples (gray tick), then a final cycle-slip. The second cycle-slip is actually not reported by the receiver, but is added during the translation from raw data to RINEX format when the half-cycle valid bit transitions. Any time the half-cycle status is invalid, that satellite will not be used for ambiguity resolution regardless of the arlockcnt. The arlockcnt will be reset by the second cycle-slip and count from there. So, in this example, if arlockcont were set to 10, all the samples from the beginning of the gap until 10 samples after the second cycle-slip will be ignored for ambiguity resolution.

The last thing to mention is that one of the recent code changes I referred to above was to add a pseudo half-cycle invalid bit for the SBAS satellites for the M8T receiver. For some reason, the Ublox receivers don’t seem to report the half-cycle status for the SBAS satellites. The change I made was in the raw data to RINEX translation where I set the half-cycle invalid bit for a fixed delay after a cycle-slip on a SBAS satellite. This makes cycle-slips on the SBAS satellites look very similar to the rest of the satellites. I had previously done this for the M8N receiver and that change has been migrated to the release code but hadn’t got around to doing it for the M8T. This attempts to avoid the half-cycle uncertainties from possibly causing a false fix if the SBAS satellites were used too early for ambiguity resolution.

Hi,
As usual, your insightful thoughts and proposed upgrades to RTKLIB and Ublox receiver applications appear to have improved performance.
I have not had much time to test this change in real time mode, but it seems to help when post processing some of the RINEX files. The most noticeable improvement appears to be in consistency of results.
I am usually impatient and short of time, so I have had to deal with false fixes. I was going to ask you regarding FORWARD VS BACKWARD false fixes, but I think this change improves that problem.
I will try to get more in-field results to provide feedback to you. For now, I will look for comments from others. (Most of my testing involves an environment of tall pine trees and nearby building and traffic.)
Richard
LikeLike